Indicacións previas
Durante o proceso de montaxe do mClon tede en conta o seguinte:
- Aparafusade os parafusos con coidado e sempre dereitos
- Colocade as porcas o máis planas posible
- Non fai falla apretar demasiado os parafusos: o xusto para que queden firmes.
- Cando haxa máis dun, presentade primeiro todos, meténdoos un pouco cada un, e logo ir apretando todos á vez ate o final.
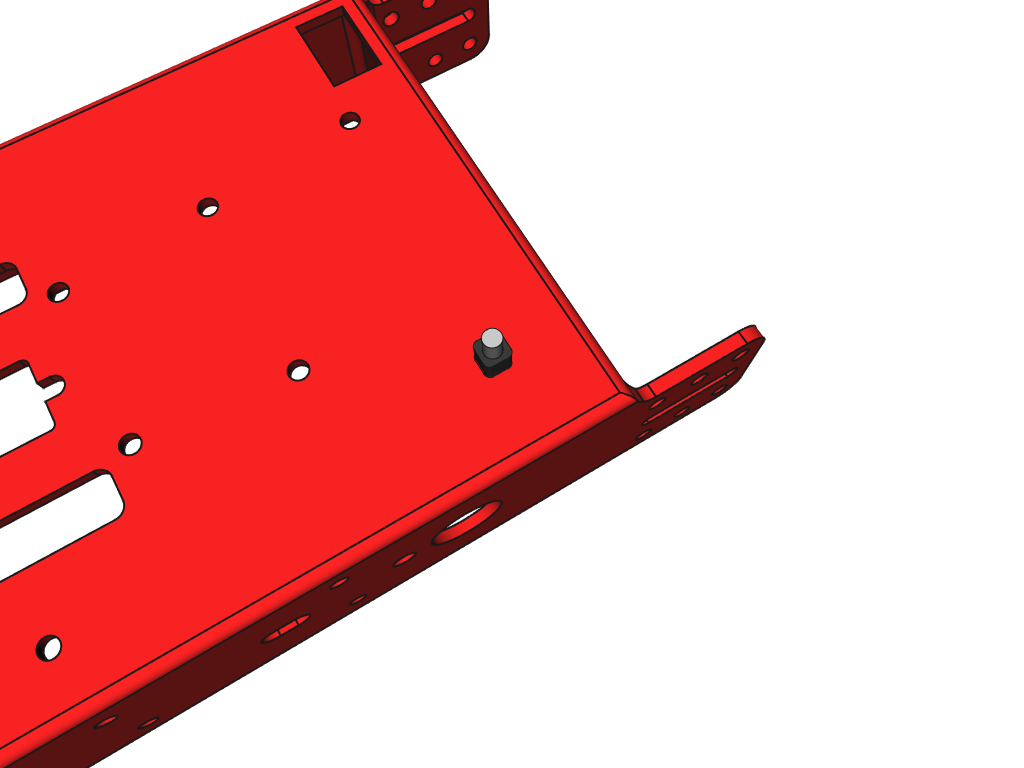
Parafuso sen porca
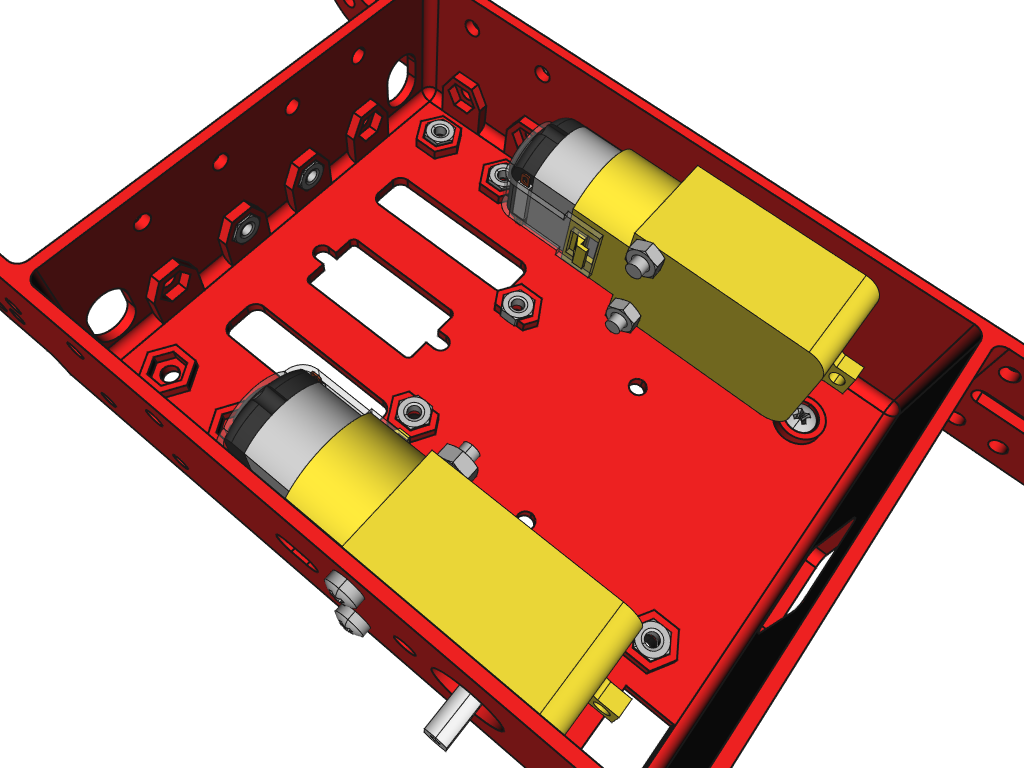
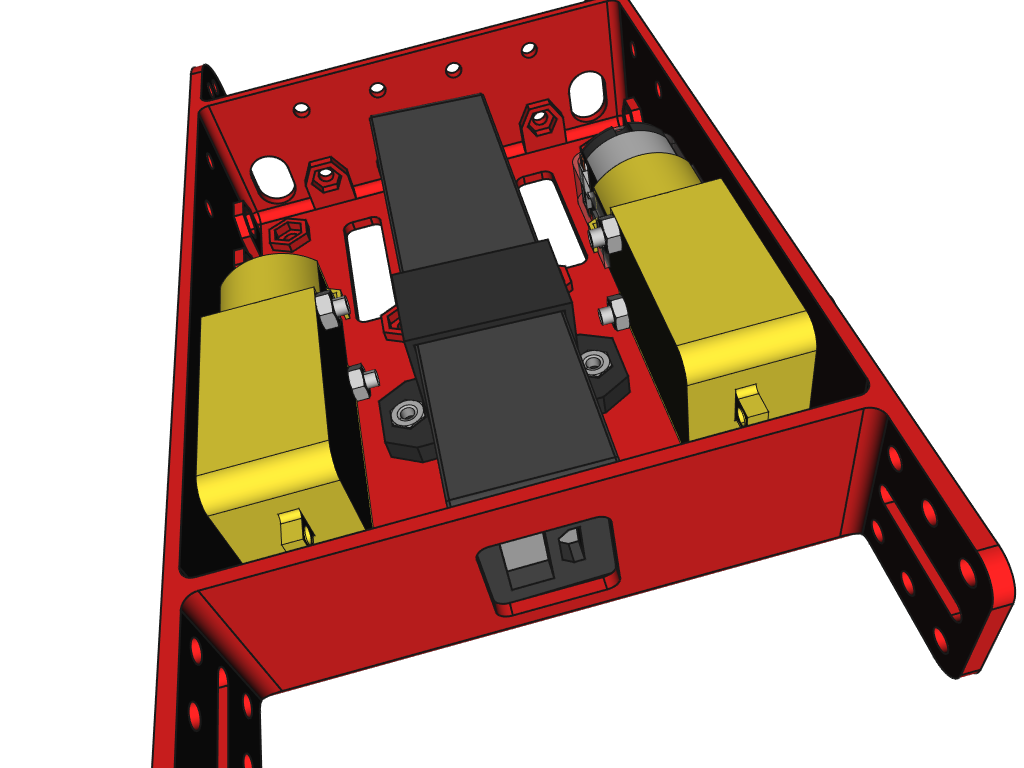
Motores
Presentamos cada motor no seu oco, tal e como se ve na imaxe, asegurándonos de meter ben o tope e o gancho nos seus encaixes para que quede totalmente plano. Logo usamos os tornillos grandes (M3x25) para fixalos (lembra presentalos e levalos todos á vez).
Colocamos porcas
Colocamos as 9 porcas tal e como se ven nas imaxes. Pode ser que estean algo frouxas ou que entren algo xustas (usa o aparafusador para axudar a metelas).

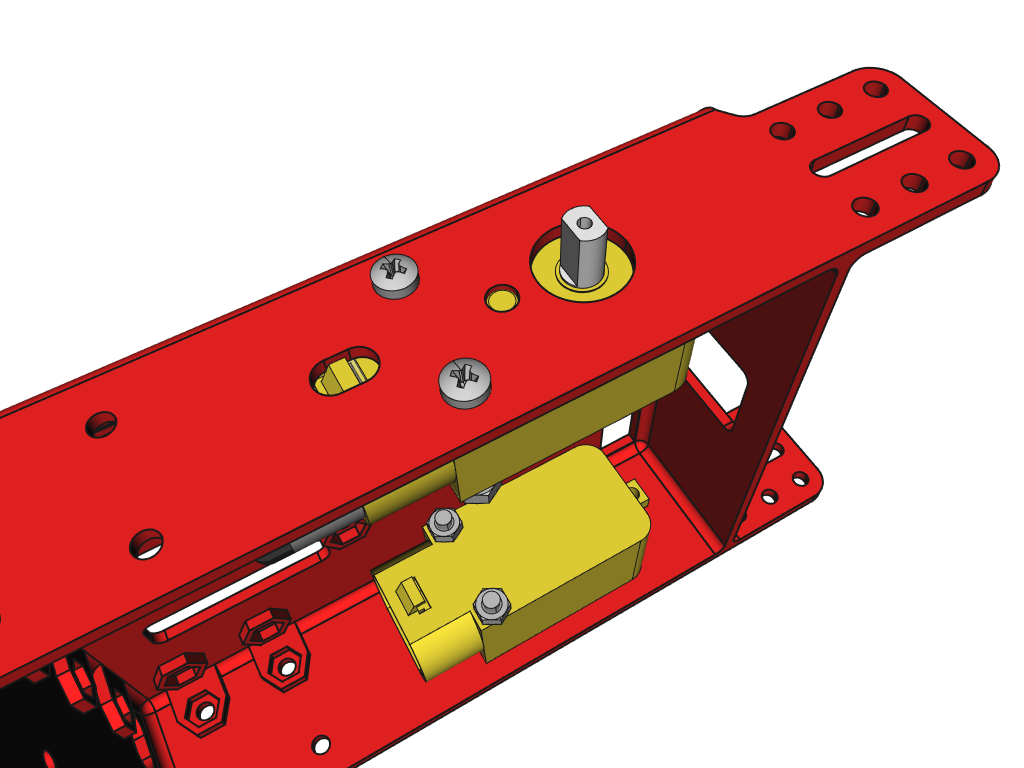
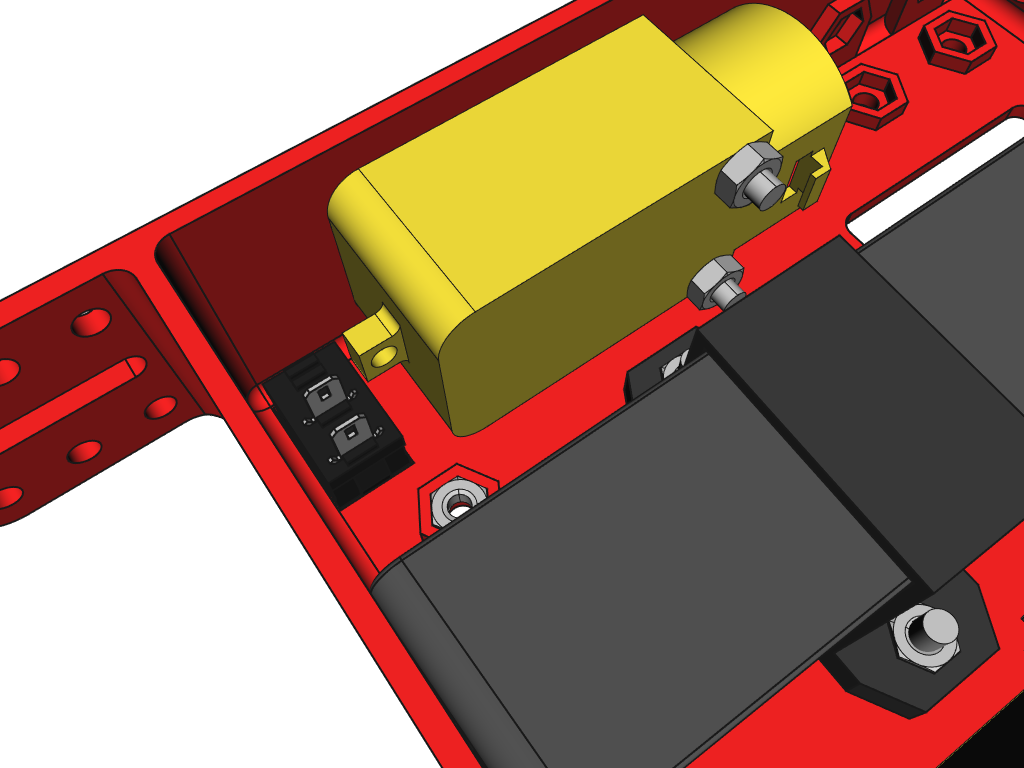
PowerBank
Presentamos agora o powerBank na súa posición final como se ve na imaxe, cos cables apuntando hacia o oco do interruptor e ben arrimado atrás. Facemos coincidir a abrazadeira cos buratos que hai no chasis.
Ollo que a abrazadeira ten sentido (non é simétrica!).
Agora suxeitamos o powerBank con dous tornillos (M3x10) dende a parte superior.
Lembrade: tornillos dereitos e con coidado, sen apretar máis da conta.
Interruptor
É momento de meter o interruptor tal e como aparece na imaxe, metendo o cable polo oco dende arriba, deixando os conectores alonxados da parede.
É momento de soldar o cable do interruptor (pídello ó monitor).
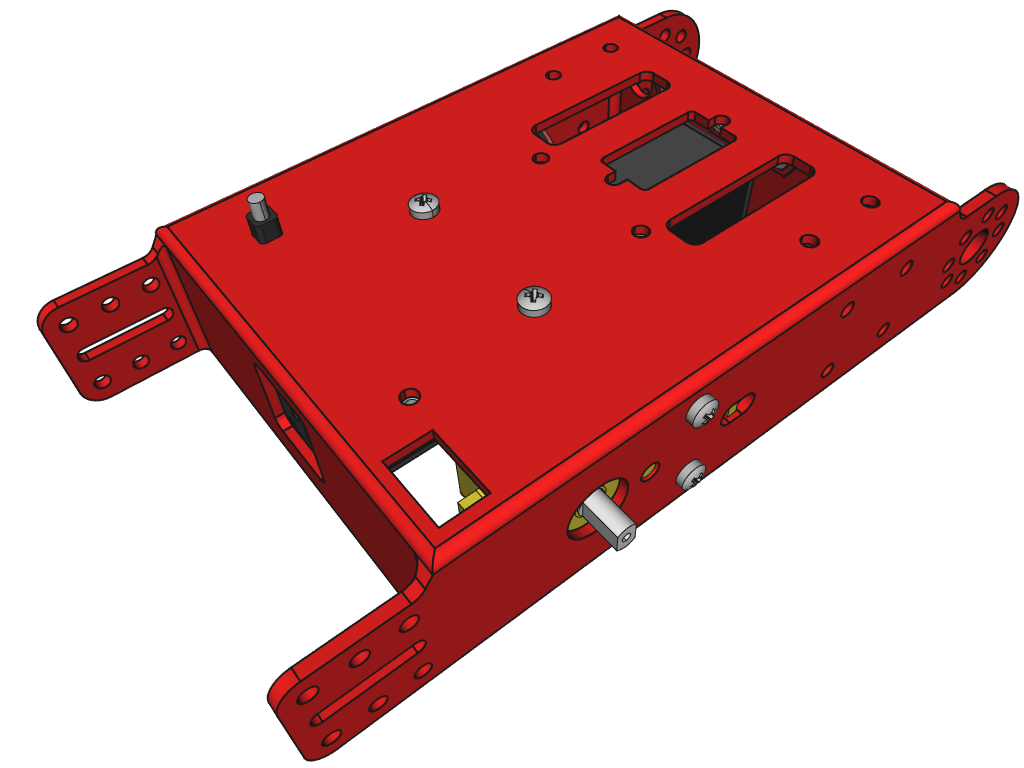
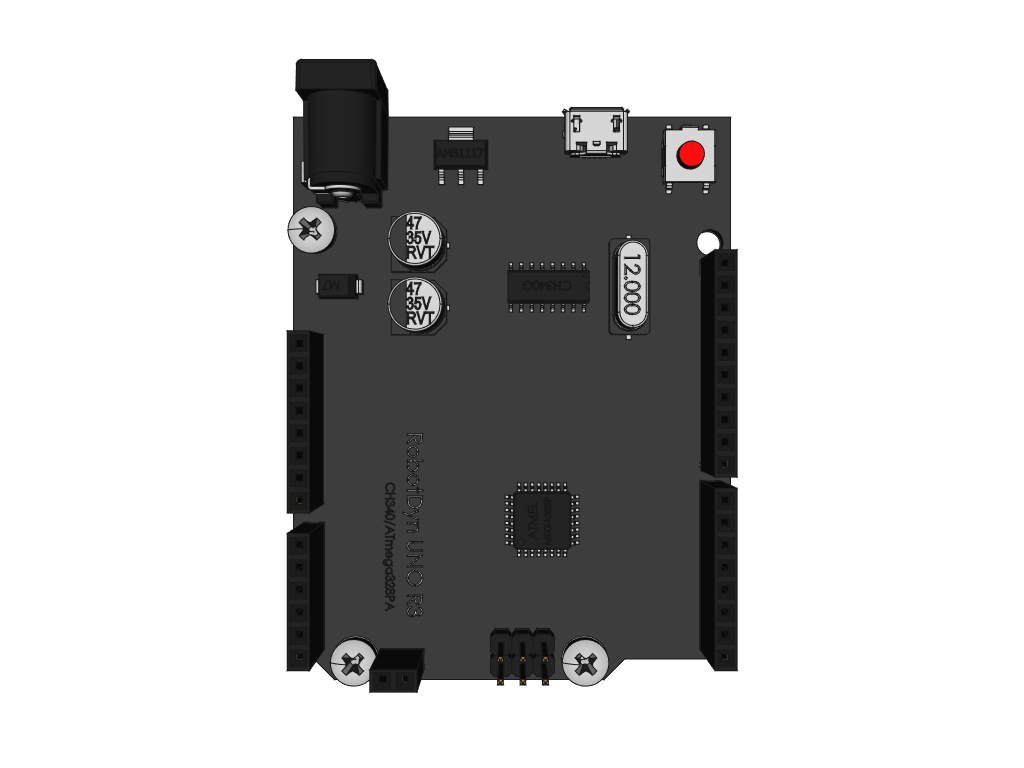
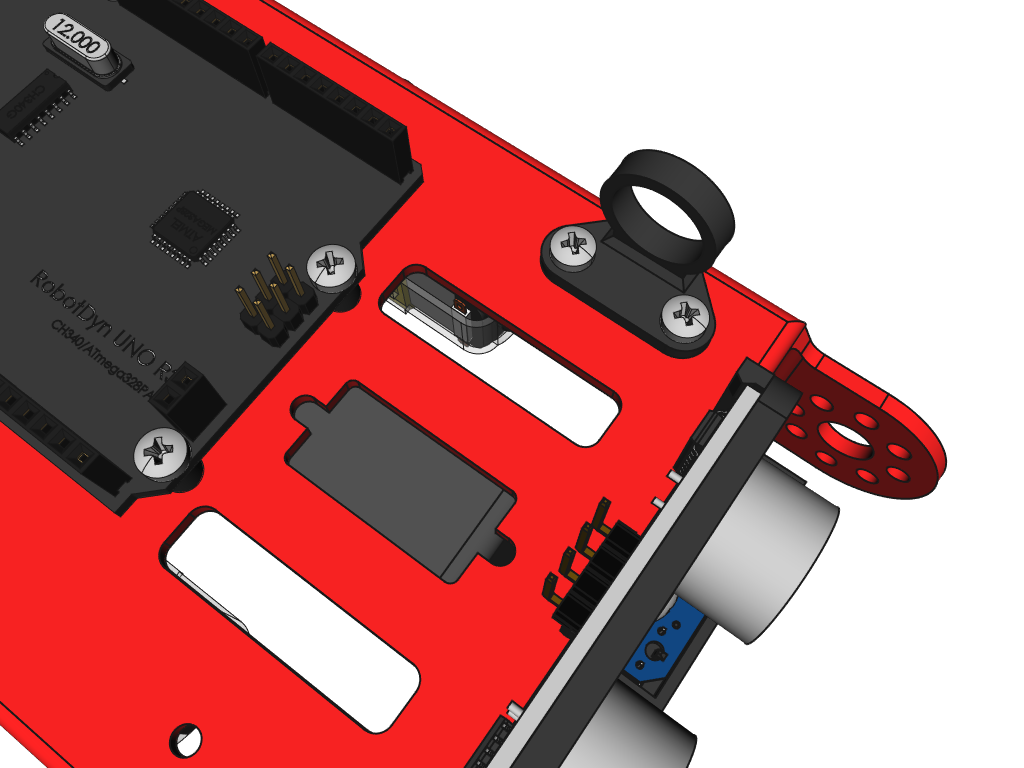
Robotdyn UNO-R3
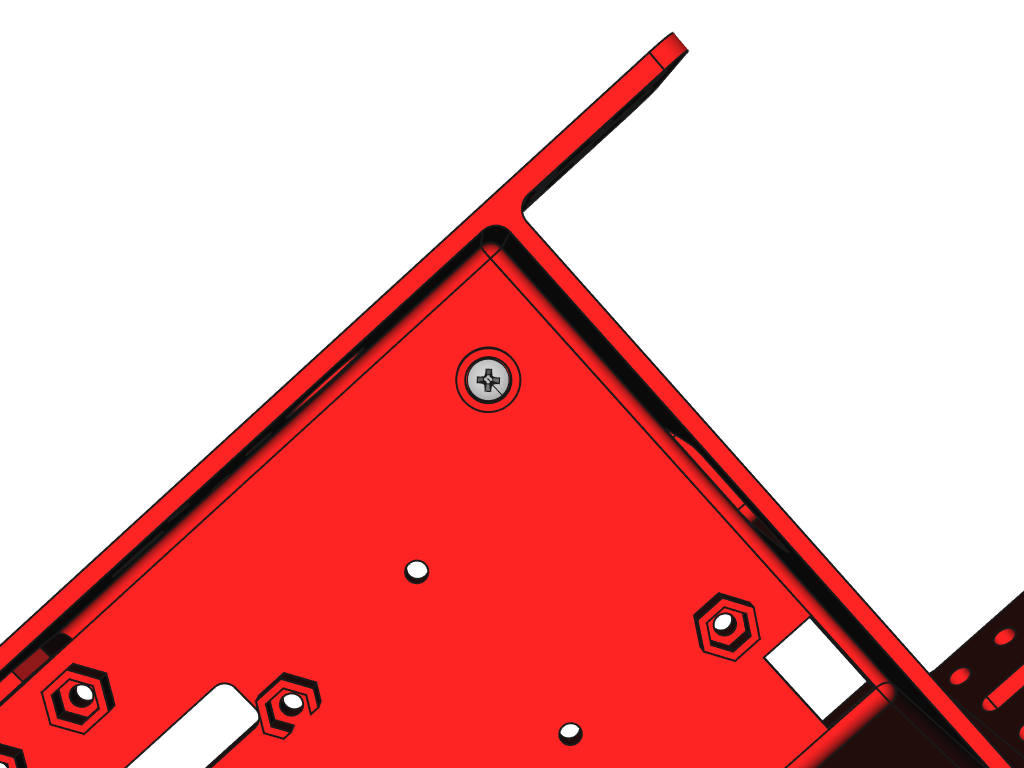
Colocamos os tornillos cos separadores redondos tal e como se ve na imaxe.
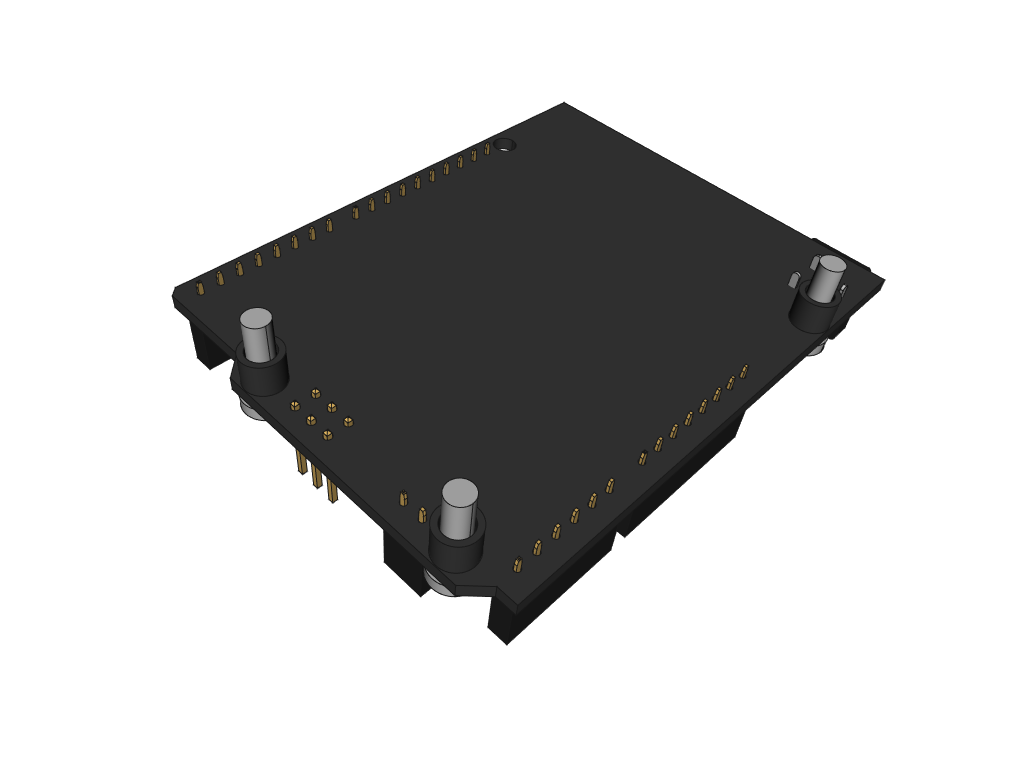
Logo colocamos este bloque sobre o chasis, encaixando no oco que falta do UNO-R3 sobre o tornillo que xa está posto no chasis, e atornillámolo: con coidado, ben dereitos e podes suxeitar as porcas desde abaixo cun dedo.
Sensores segue-liña
O primeiro paso é endereitar os pins dos sensores, e para iso imos conectarlle os cables longos e aproveitar os propios terminais dupont para facelo.
A continuación introducimos as porcas nos ocos correspondentes do soporte para os sensores.

Agora colocamos os sensores no soporte tal e como se ve na seguinte imaxe.
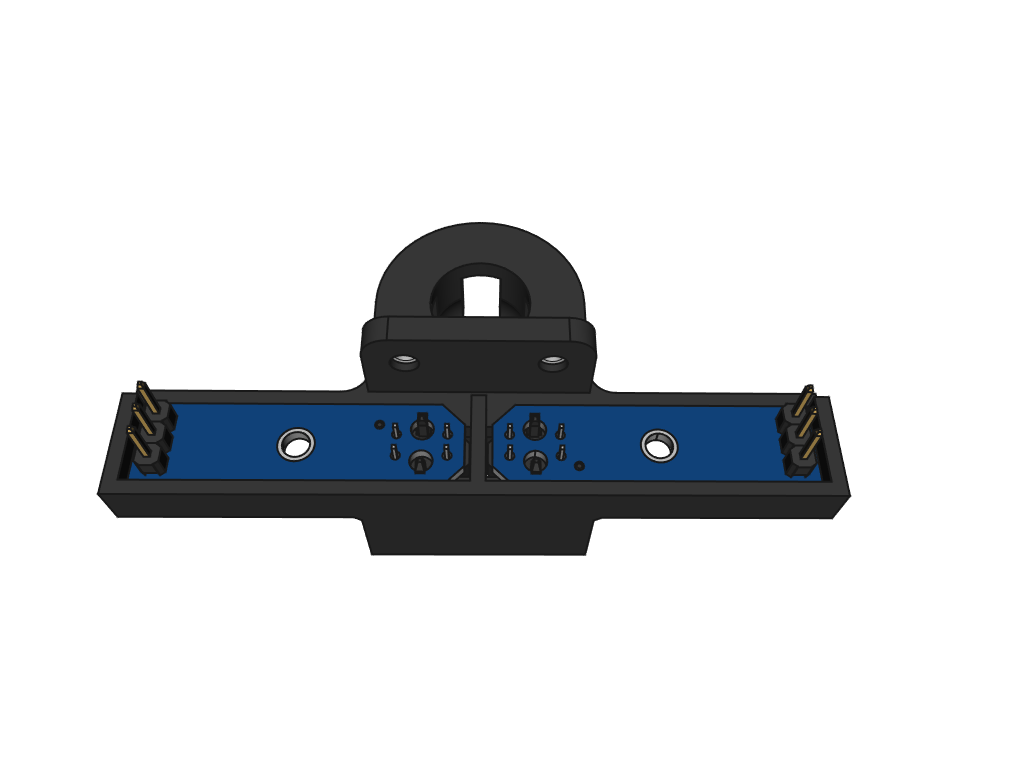
Aparafusámolo (lembra, con coidado, ben dereitos, usando o teu dedo para que non caian as porcas e sen apretar máis da conta).
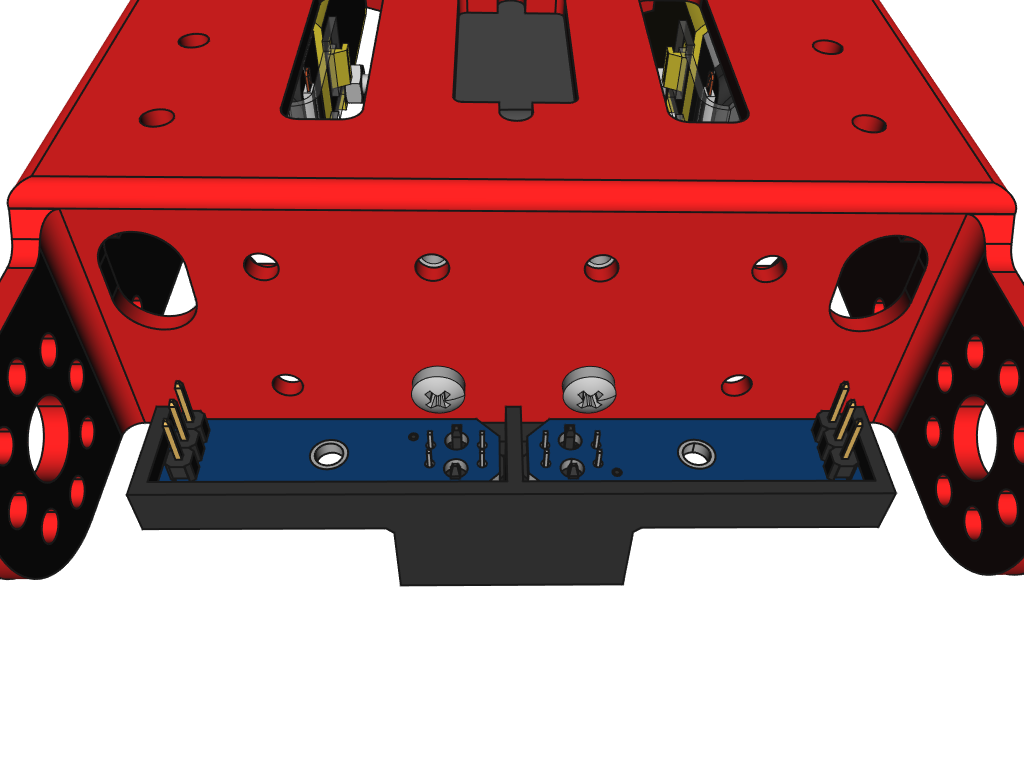
Finalmente colocamos a bola e pasamos os cables polos buratos ovalados frontais para sacalos cara arriba polos buratos rectangulares.
Sensor ultrasóns
Fíxate en que os pins centrais están soldados entre si antes de encaixar o sensor de ultrasóns no soporte tal e como aparece na imaxe (ate que faga “clac”).

A continuación presentamos a peza nos seus buratos e aparafusamos (xa sabes, con coidado, ben dereitos, usando o teu dedo para que non caian as porcas e sen apretar máis da conta).
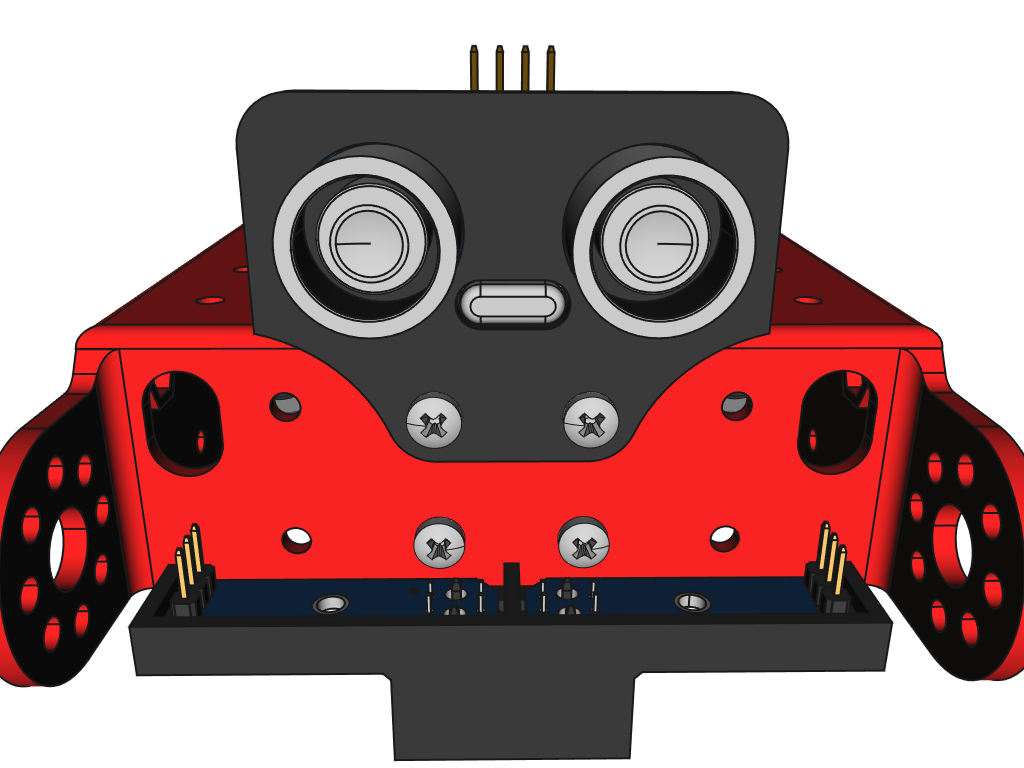
Finalmente conectámoslle tres cables (dous nos extremos e un en calqueira dos pins centrais)
Soporte zumbador
A continuación montamos o soporte do zumbador tal e como aparece na imaxe. Lembra atornillar con coidado, ben dereito, usando o teu dedo para que non caian as porcas e sen apretar máis da conta.
Rodas
Antes de encaixalas, hai que montar as catro xuntas tóricas (neumáticos) nas llantas (2 en cada unha). Finalmente encaixámolas: fíxate que teñen unha posición concreta porque o eixo está aplanado. Empuxa a roda suxeitando o motor desde atrás (para que non se dobre/rompa o chasis).
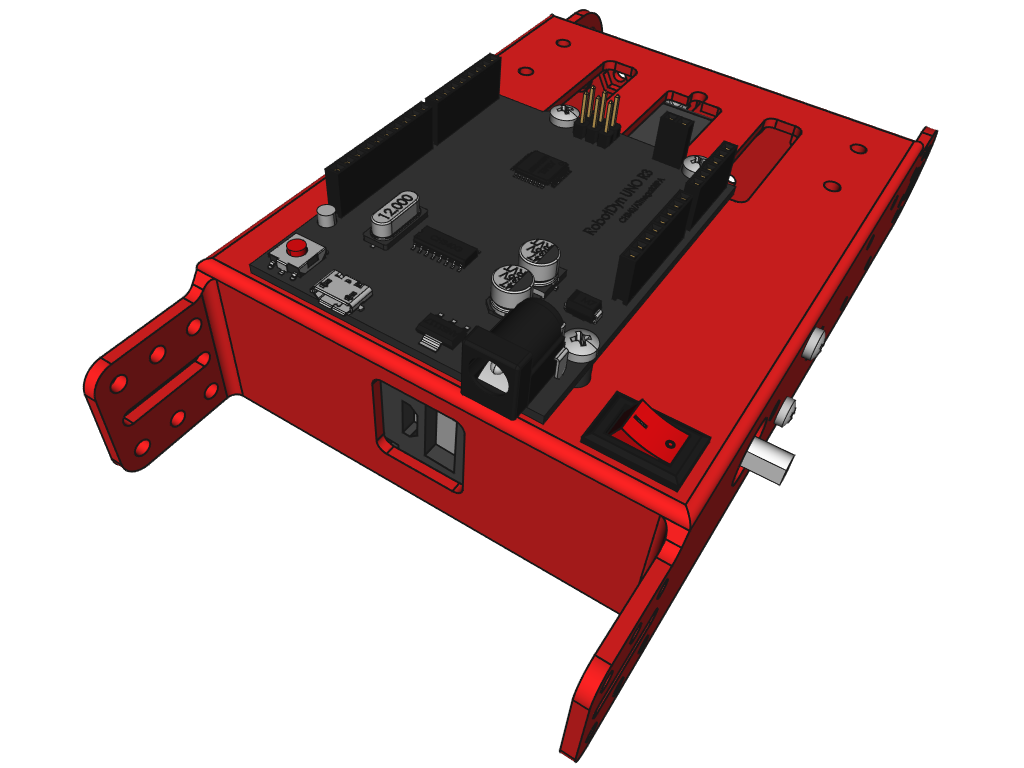
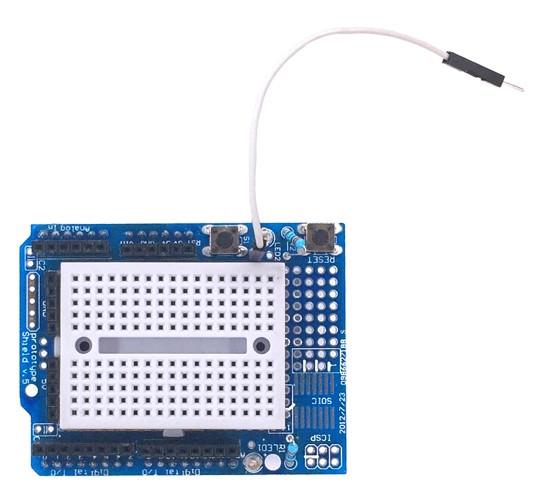
Protoshield
Por último montamos o protoshield: primeiro quitámoslle o protector da pegatina da protoboard e pegámola na placa, tal e como aparece na foto. Despois encaixámola enriba do UNO-R3, gardando exactamente a mesma posición que este.
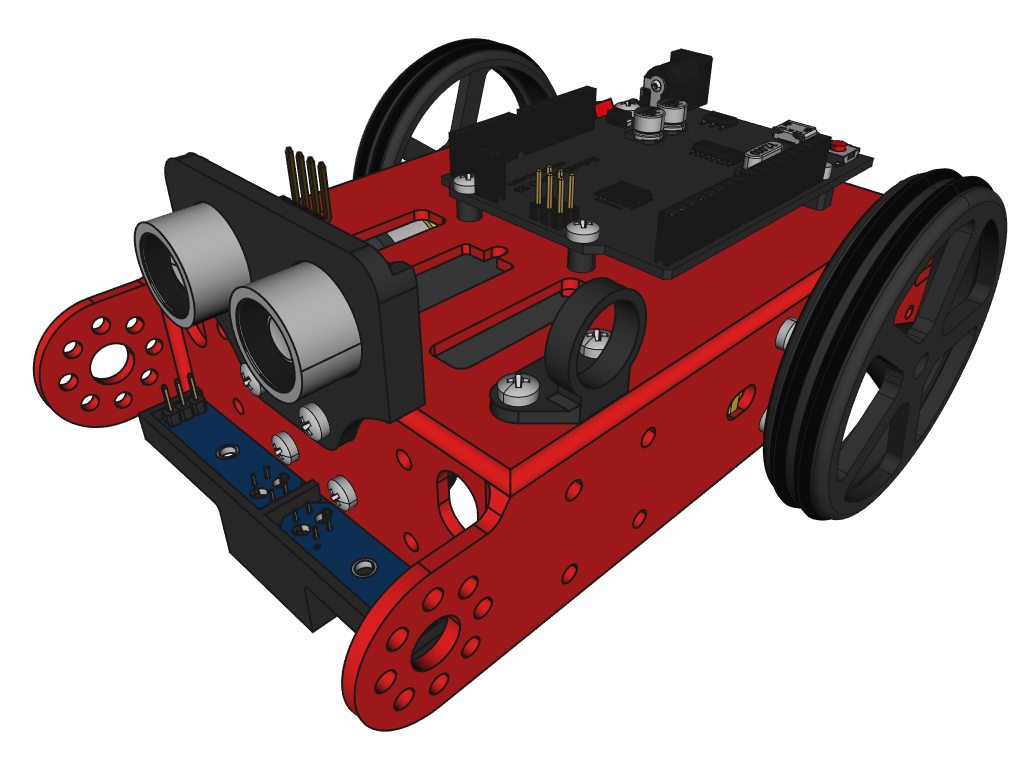
E con isto remataches a primeira parte (montaxe).
Agora podes seguir ca segunda pulsando neste enlace: electrónica.