1. Protoshield
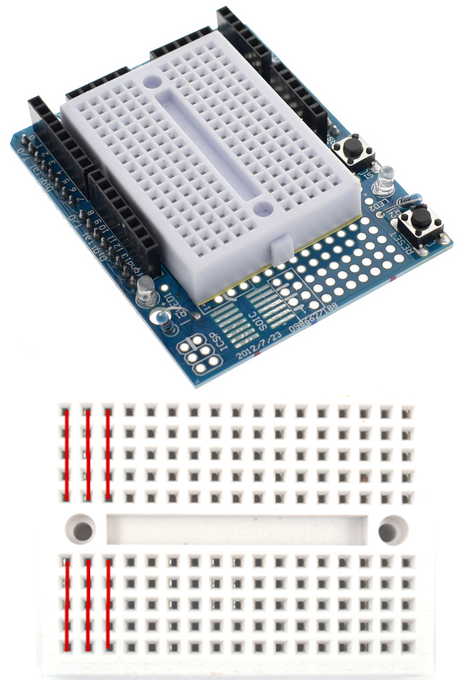
Na imaxe da dereita podes ver unha protoshield e debaixo a protoboard que leva.
Antes de nada, se non o fixeches xa, deberías pegar a protoboard na base como na imaxe, utilizando o adhesivo que xa trae.
As conexións internas nunha protoboard son como as que se ven na imaxe (liñas vermellas): os compoñentes que conectes nunha mesma liña vertical estarán conectados entre si.
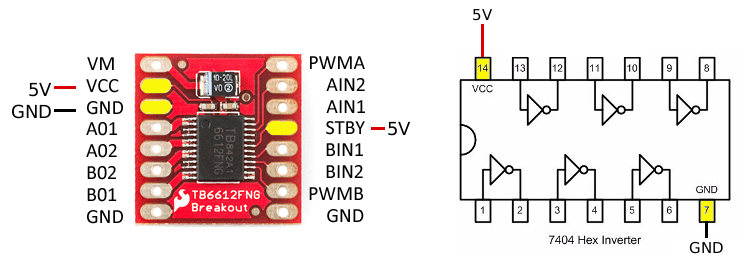
2. O control de motores
Esquema xeral
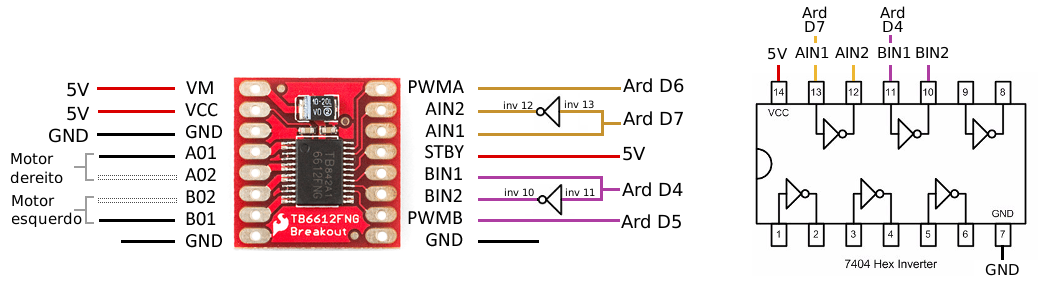
Imos montar o seguinte esquema electrónico, co controlador de motores (esquerda) e o inversor (dereita). Explicaremos paso a paso como facelo.
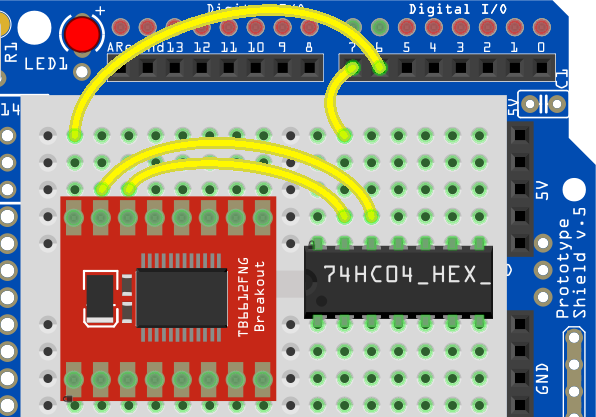
Colocación dos compoñentes
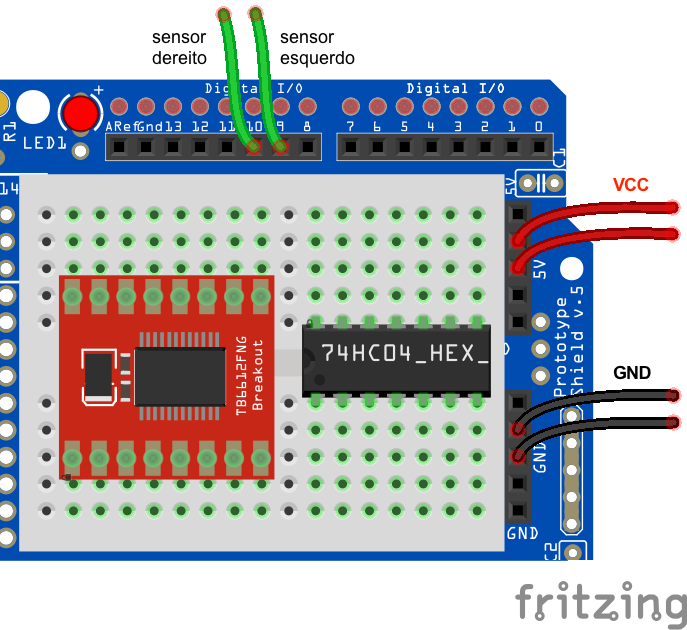
Conectamos o controlador (ou driver) e o inversor tal e como se ve na imaxe. Imos deixar unha liña de buratos á esquerda para a alimentación e outra liña no medio para outras conexións que necesitemos facer.
Imos habilitar unhas filas de buratos para a alimentación. Para iso conectaremos un cable desde 5V ata a tira superior esquerda e un cable desde GND ata a tira inferior esquerda. Se consideramos os conectores que xa temos na dereita do propio shield, imos ter unha chea de buratos para alimentar os diferentes compoñentes do mClon.

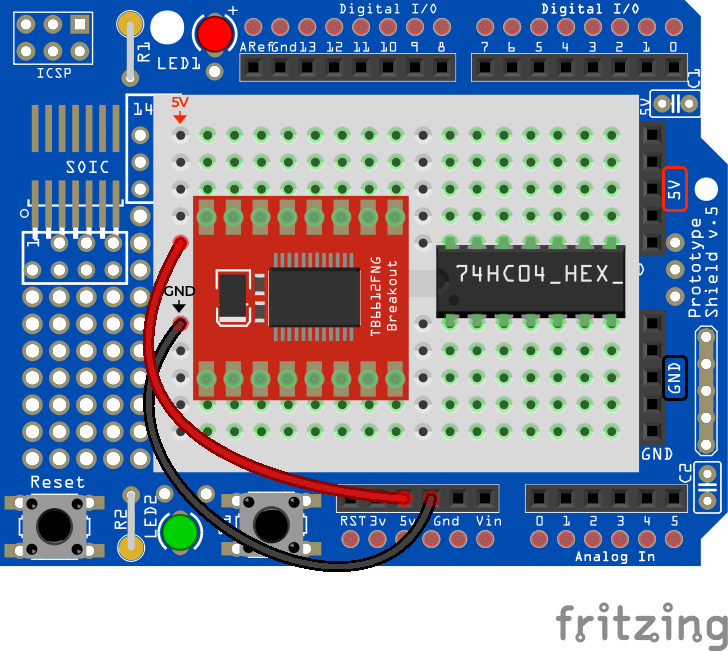
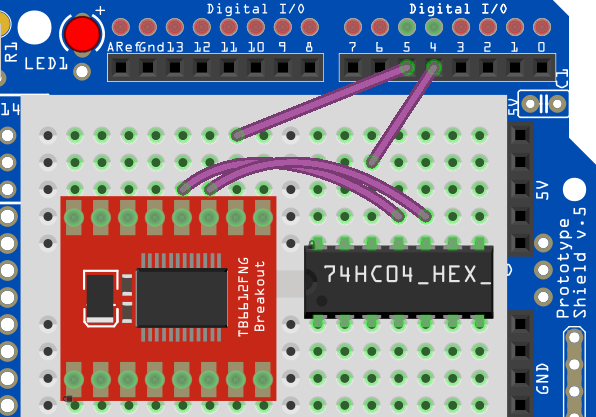
Alimentamos os elementos
No controlador hai tres pins que podes conectar a GND. Con usar un só é suficiente, non os tes que conectar todos. Nós eliximos o indicado na figura.

Pins de velocidade e sentido de xiro
No seguinte esquema tes o que imos conectar a continuación:
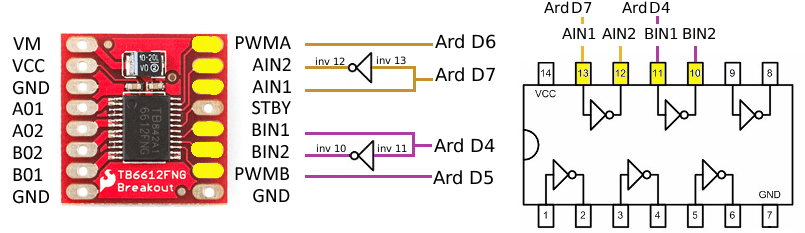
Quitamos da imaxe as conexións anteriores para ver mellor o que temos que facer, pero ti non quites os cables que xa tes conectados.
- PWMx é o pin de control de velocidade (ou potencia)
- xIN1 e xIN2 son os pins de control de xiro
Empezamos polos pins de control do Motor A e, a continuación, os do Motor B.
Conexión dos motores
Agora só falta conectar os motores. É importante que te fixes na polaridade. O sinal que vai aos motores debe estar invertido, xa que están colocados en sentido oposto. Para que as dúas rodas xiren na mesma dirección, un dos motores deberá xirar nun sentido e o outro no contrario.
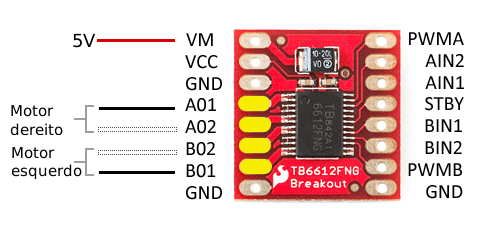

Para finalizar, terás que conectar o cable de alimentación dos motores: do pin VM a 5V.
Unha vez feitas todas as conexións teremos un cableado como o da imaxe seguinte.

Os sensores segue-liña
Os sensores de liña están colocados no mClon como aparece na seguinte imaxe. Cada un ten tres cables: dous de alimentación (VCC e GND) e un de datos (OUT). O pin de datos do sensor esquerdo vai conectado ao pin dixital D10 da placa, e o do sensor dereito ao pin dixital D9. Para conectar os cables de alimentación debes buscar buratos libres nos zócalos GND e 5V (para VCC) no shield.

3. O sensor de ultrasóns
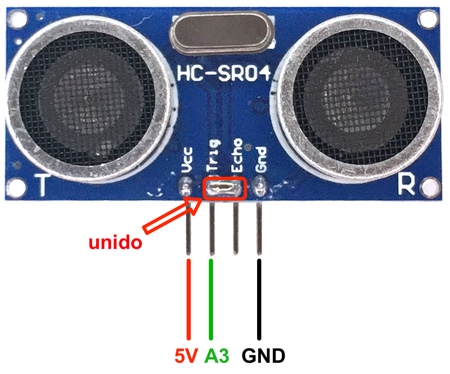
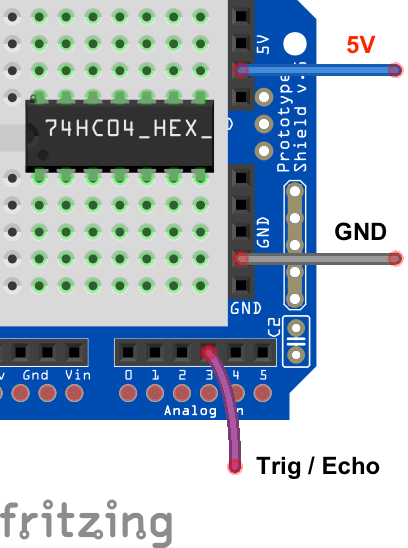
Asegúrate previamente de que os pins Trig e Echo están conectados entre si (cun punto de soldadura). Despois, conecta calqueira deses pins ao pin analóxico A3 da placa e os outros, VCC e GND, nos buratos de alimentación no shield.
4. O pulsador
Imos agora a conectar o pulsador de placa. O esquema é o da figura. Debes utilizar para as conexións unha das tiras de buratos da protoboard que quedaron libres entre o driver e o inversor. Debes pinchar alí os cables brancos que conectamos ao pulsador do shield e ao pin A7 e despois unha resistencia de 10k desde alí ata 5V.
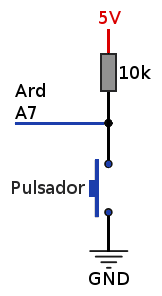
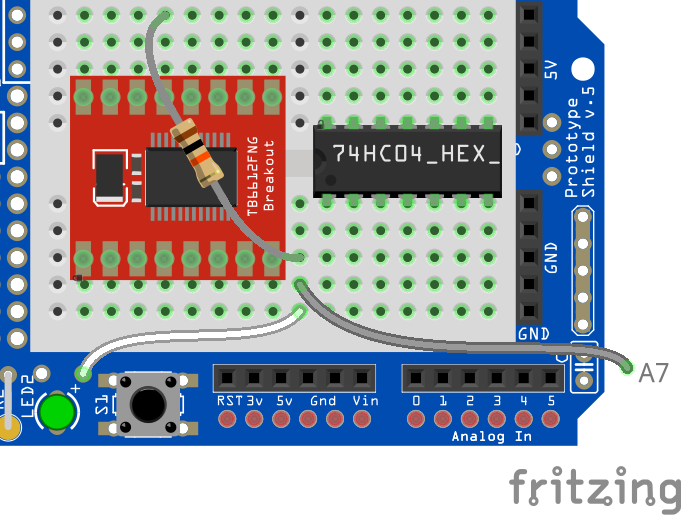
Ollo, debes tratar que as patas da resistencia NON toquen os pins do controlador de motores. Podes illalas cun pouco de cinta illante, termofunda ou similar para asegurarte.
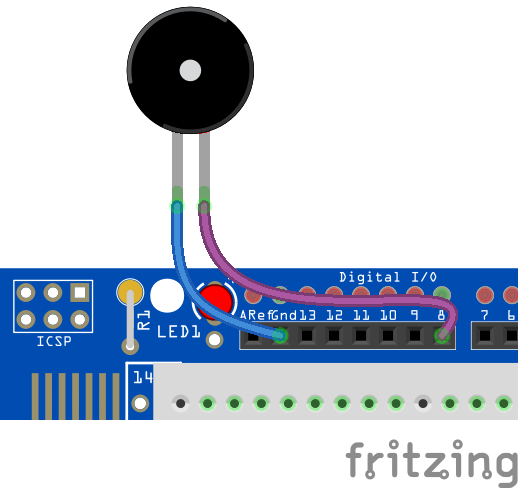
5. O zumbador
A conexión do zumbador é moi simple: só hai que conectar dous cables: un ao pin dixital D8 e o outro a GND (non importa a orde).
6. Alimentación xeral
O último paso é conectar a alimentación:
- Primeiro asegúrate de que o interruptor está apagado (posición 0)
- Despois conecta o cable vermello do interruptor ó burato libre das conexións de 5V
- E para rematar, o cable marrón ó libre das conexións de GND
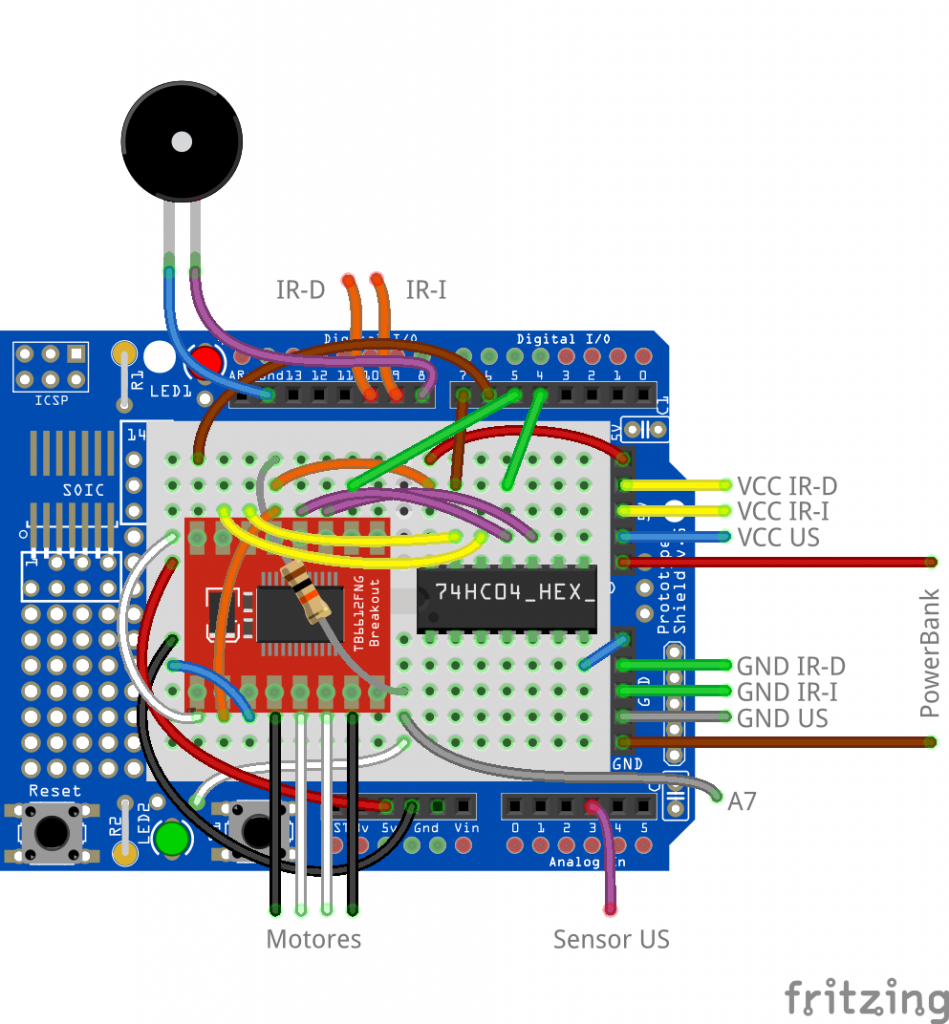
Se seguiches todos os pasos correctamente deberías ter unha montaxe como a da seguinte imaxe.